This is a follow up to my post from a few weeks ago. At that time, I could not figure out how to include mechanical forces and components in a model.
I found a better toy model, and I think I got it. I am posting it here for completeness, and in hope that it may be useful to other users (if it is correct). And if it is not, please comment!
Sauna Module (SM) for the International Space Station (ISS)
Capella Model Purpose
My work project consists of adding a new module to an existing semiconductor cluster tool. While I was able to capture and handle user needs, I found myself unable to capture and handle mechanical forces.
I defined this ISS & SM problem and built Capella models to explore alternate ways of defining the system, actors, and other external entities. I need to learn the ARCADIA way to:
- Capture user needs (astronauts to safely get sauna at the ISS)
- Capture the mechanical, electrical and all other requirements for the Sauna Module to safely operate with the ISS
SM Specification that drives Operational Analysis (OA)
- Module for the ISS that will provide the astronauts the ability to take a sauna for their restorative health
- The module has to conform to all ISS requirements
- Secure mechanical connection to the ISS
- Astronauts will be able to be in contact with rest of crew while in Sauna
- ISS provides power, water, breathable air, all data and communication channels
Successful Capella model
Approach:
- Sauna Module (SM) is the object of the project. It is the System
- The external actors/entities are
- the astronauts
- the ISS
- In OA, only the astronauts and the ISS are visible. The SM shows up in the
System Analysis
Here are a few graphics of this model:
The OSB captures the OS of mechanical connection to ISS
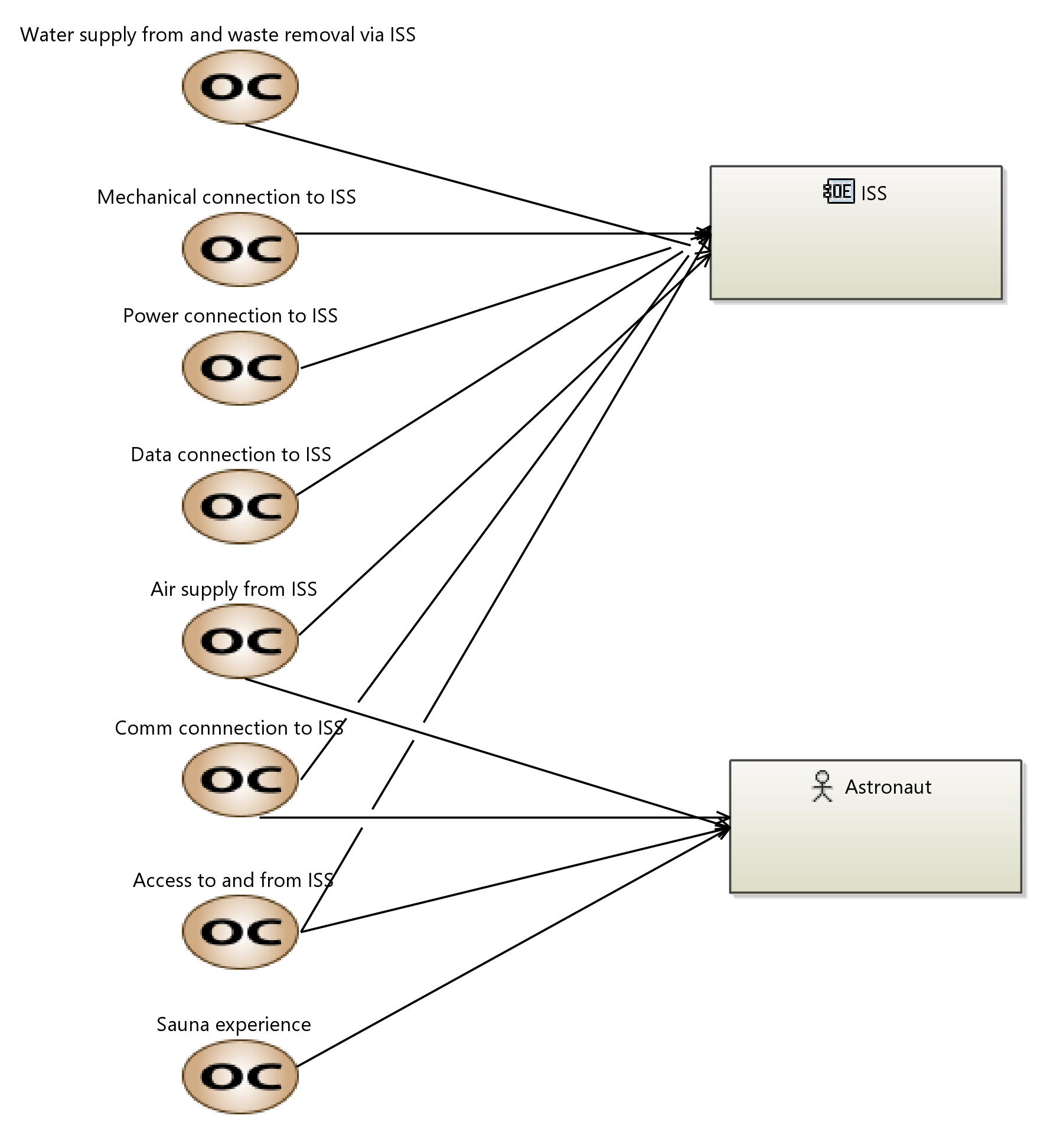
I did not define any functional chains for mechanical linkage. But I defined functional exchange “Mechanical Connection” in this OAB and assigned it to the OC.
.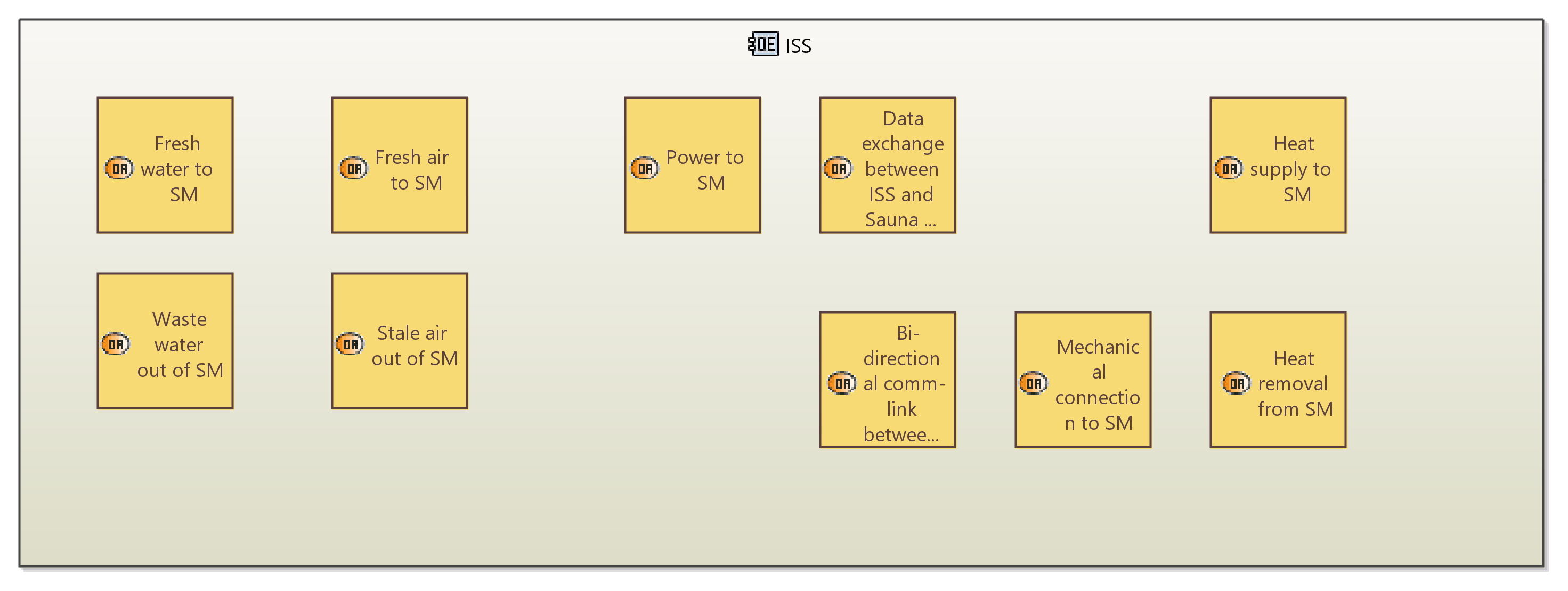
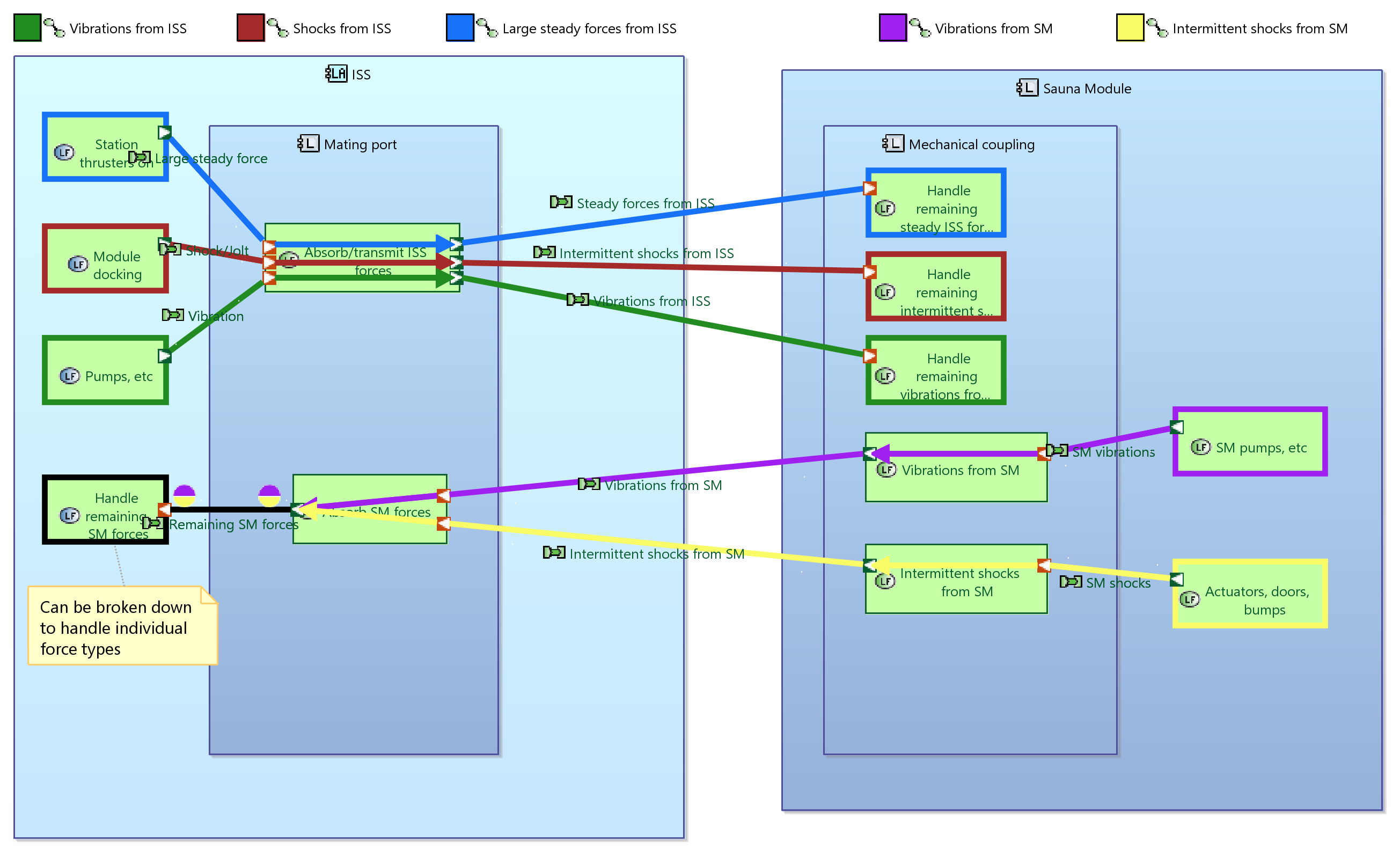
This eventually propagated to the Logical level as the following [LAB]:
I am happy with this for now, and I will proceed with my work project.
For completeness, here are two alternate (& incorrect) definitions of the system and external actors that do not allow for a clean specification of mechanical interactions.
Alternate (failed) definitions of system, actors, entities
My first attempt was the first of the following two. It did not allow me to
specify forces between the ISS & SM
ISS+SM as the System
- Astronaut enjoying the SM is the only actor
- I was able to capture nicely how the astronaut uses the additional
capability provided by the SM- But I was not able to specify the mechanical coupling as an Operational
Capability
- But I was not able to specify the mechanical coupling as an Operational
- While I could introduce mechanical coupling within the system, I did not
find a way to link mechanical coupling between them to Operational
Capabilities
- I was able to capture nicely how the astronaut uses the additional
ISS is the System
- The two actors are
- SM is one actor
- Astronaut the other
- In principle, I can handle forces, but the design is then focused on the SM
actor, while it should really be on the system - I did not analyze this scenario