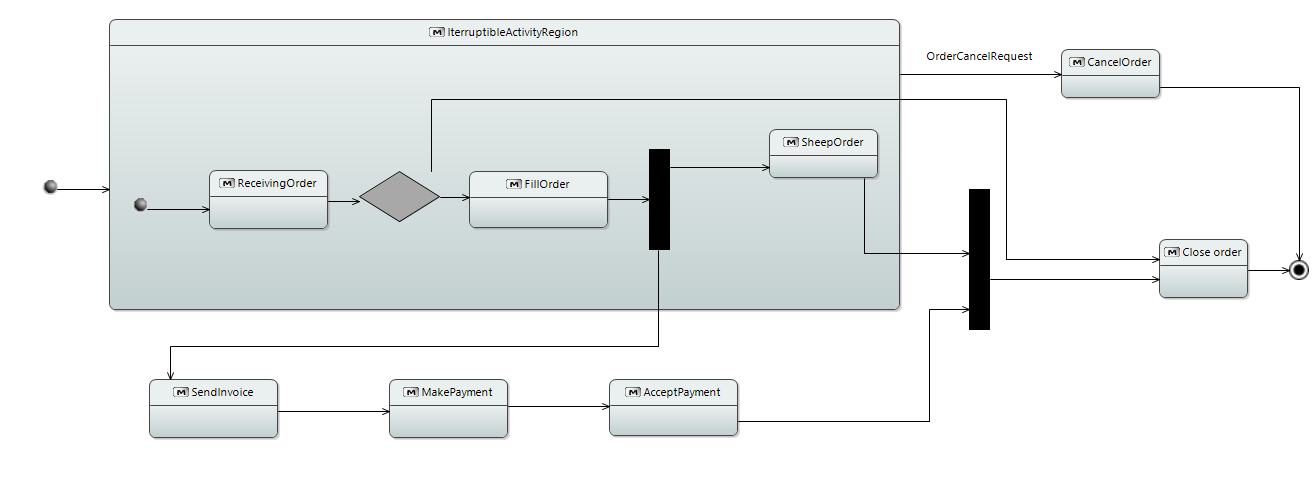
As I understand mode and states can be easily used to model interruption region.
But it’s not always comfortable to model control flow on statecharts in parallel with modeling data flow in functional decomposition.
I investigate using Behaviour Tree notation to model control flow in functional decomposition (without statecharts). See my post on behaviour trees in Capella.
In behaviour trees interruptible regions also can be modeled easily.